راهنمای خرید سیستم نیمه حرفه ای و حرفه ای تخصصی معماری مهر ٩٨
با آغاز فصل بازگشایی مدارس و دانشگاه ها تقاضا برای خرید لپ تاب و سیستم
افزایش می یابد. علت آن هم ورود افراد به رشته های تخصصیو نیاز به رایانه ای با
توان پاسخگویی مناسب است. به مانند گذشته پیشنهادات ما بر پایه موجودی فعلی بازار
و آخرین قیمت های آن است. سیستم پیشنهاد ما جهت کاربری های عمومی دانشجویان معماری
و کاربری متوسط و حرفه ای اتوکد و اسکچاپ و رندر نیمه حرفه ای با VRAY و کورانا و
کاربری مقدماتی با موتورهای بازی سازی نظیر UE و یونیتی مناسب
خواهد بود.سیستم پیشنهادی ذیل مناسب کارکردهای طولانی مدت هست. قیمت های درج شده هم به تومان است. اگر علاقه ای به رندرهای ریل تایم
ندارید می توانید از سیستم پیشنهادی کارت گرافیک را حذف نمایید.
سیستم پیشنهادی برای کاربری متوسط و حرفه ای اتوکد و اسکچاپ و فوتوشاپ و رندر
نیمه حرفه ای با VRAY و کورانا و کاربری مقدماتی با موتورهای بازی
سازی نظیر UE و یونیتی
CPU: Intel Core i۷-۸۷۰۰K
Coffee Lake ۴/۵۰۰/۰۰۰
Mother Board: ASUS TUF
Z۳۷۰-PLUS GAMING ۲/۳۵۰/۰۰۰
Graphic Card: Asus ۴GB Dual-GTX۱۶۵۰-O۴G ۲/۷۰۰/۰۰۰
Ram: Gskill Ripjaws V ۱۶GB ۸GBx۲ ۳۰۰۰Mhz CL۱۵ ۲/۰۰۰/۰۰۰
Power Supply: GREEN GP۷۰۰B-HP+
۱/۰۰۰/۰۰۰
HDD: WD Blue ۱TB ۵۰۰/۰۰۰
SSD: Liteon MU۳ PH۶ Series SATA۳ SSD – ۴۸۰GB ۸۰۰/۰۰۰
“Maverick”
واژهای انگلیسی و به معنای فردی مستقل و تکرو است که با هیچ گروه و حزبی
همراه نمیشود. سبک
ماوریک جزئی از سبک مدرن با رویکردی مبتکرانه، غیرمعمول و
غیرمتعارف است؛ سبکی جوان و گستاخ که به قانونها احترام نمیگذارد این سبک در بین طراحان جوانی
که میخواهند در قید و بند قوانین حاکم نباشند بسیار محبوب است.
دکوراسیون ماوریک به دکوراسیون بی قید و بند معروف است, در این
سبک هیچ نظم خاصی وجود ندارد و از اکسسوری های متفاوت استفاده میشود.
منزل می تواند آرامشی ژرف به روح ببخشد و یا استرس و تنش را به
جان بنشاند. نوع دکوراسیون داخلی می تواند متفاوت باشد و بسته بر نوع نگاه و علایق
افراد انتخاب شود.
بسیاری از افرادی که با سبک ماوریک آشنا نیستند، آن را غیرعادی
و از نظر بصری چالش برانگیز می یابند. این زمینه طراحی بی مانند و نوآورانه است؛
افراد در مواجهه با آن یا عاشقش می شوند یا متنفر. وقتی بحث ماوریک می شود حد وسطی
برای دیدگاه ها وجود ندارد؛ این سبک صفر یا صد است.
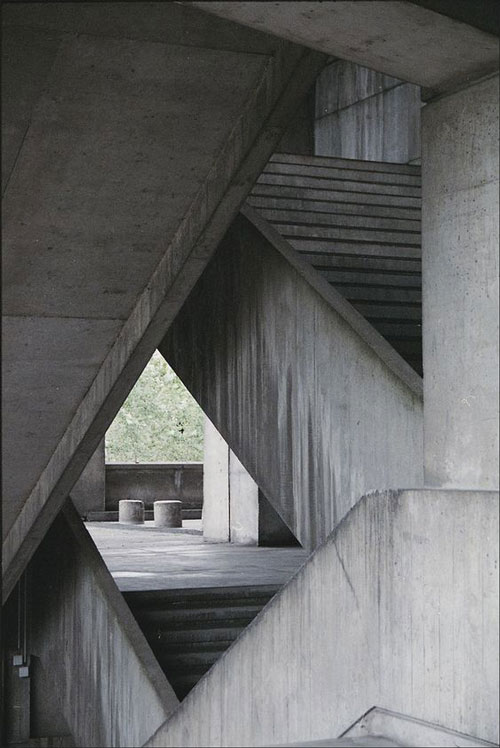
بروتالیست سبکی از معماری است که در آن ساختمانها با بتن بکر و
بدون روکش و دیگر عناصر کاربردی و به عبارتی عریان و عاری از زینت اجرا میشوند. اصطلاح (بروتالیسم) در ۱۹۵۴ در فرانسه و انگلستان برای توصیف این شیوه
بکار رفت
نخستین بار در سال ۱۹۵۳ میلادی، توسط پیتر و آلیسون اسمیتسون،
مورد استفاده قرار گرفت. این زوج علاقهمند به نمایش خام مصالح بودند.این اصطلاح ریشه در واژهٔ
فرانسوی بتون بروت به معنای «سیمان خام» دارد، عبارتی که توسط لوکوربوزیه برای
تشریح متد استفاده خاصش از سیمان استفاده میشد، متدی که توسط آن بسیاری از بناهای پس از جنگ
جهانی دومش را ساخت. این اصطلاح پس از این که توسط رینر بنهام، منتقد معماری در
عنوان کتابش:
“معماری بروتالیست نوین: اخلاقیات یا
زیباییشناسی؟” در سال ۱۹۶۶
میلادی به کار گرفته شد، رواج بسیاری پیدا کرد، مضمون کتاب توصیف برخی دیدگاههای
معمارانه بود که اخیراً در اروپا رایج شده بود
.
ریشه اصلی پیدایش
فلسفه و سبک معماری بروتالیسم را میتوان در حوادث پس از جنگ جهانی دوم جستجو کرد؛
چراکه به سبب سالها جنگ تمام عیار، اقتصاد اروپا به کلی فلج شده بود و امکان
استفاده از مصالح معمول ناممکن مینمود. بنابرین تمامی معماران به دنبال مصالحی
ارزان برای جایگزینی با فلز بودند که در نهایت جستجوهایشان به بتن ختم شد
.
فلسفه بروتالیسم
پیدایش خود را مدیون بتن و استفاده از آن در سطوح گسترده است. لیکن در این سبک هیچ
محدودیتی برای استفاده از متریالهایی نظیر چوب، آجر، شیشه، فولاد و سنگهای تراش
نخورده به شکل خام آنها نیز وجود ندارد. البته سبک معماری بروتالیسم با ویژگیهای
همچون طراحی چهارگوشه و قالببندی نمایان نیز شناخته میشود. با این حال مهمترین
نکته در سبک معماری بروتالیسم در تفاوت آن با سایر سبکهای معمول نهفته است؛ چراکه
تمامی سبکهای رایج دیگری نظیر سبک
معماری دیکانستراکشن و
یا سبک
معماری فولدینگ به واسطه حجم خاص خود اهمیت پیدا میکنند. در حالیکه سبک معماری
بروتالیسم، مبتنی بر مصالح به کار رفته در آن است
.
معماری
بروتالیسم در ایران قدمتی به اندازه انواع اروپایی آن دارد و طراحی سردر دانشگاه
تهران توسط هوشنگ سیحون در دوران محمدرضا شاه پهلوی را میتوان نخستین نمونه از
کاربرد سبک معماری بروتالیسم در ایران دانست. به دنبال آن، سبک معماری بروتالیسم،
این بار در ساخت دانشگاه بینالملی شیراز به کار گرفته شد. این دانشگاه که طراحی
آن به عهده “مینورو یاماساکی” بود از جمله
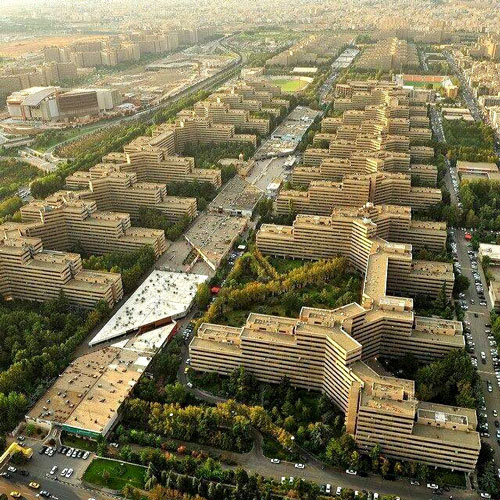
آثار شاخص معماری بروتالیسم در ایران به شمار میرود.شهرک
اکباتان تهران را میتوان برجستهترین نمونه موردی سبک بروتالیسم در ایران دانست.
ساخت این شهرک که طراحی آن به عهده “جردن گروزن” از “شرکت ساختمانی استارت Starret بود در سال ۱۳۴۵ خورشیدی کلید خورد و
در نهایت ۱۰ سال پس از آن پایان یافت. شهرک اکباتان به عنوان یکی از مدرنترین شهرکهای
مسکونی در ایران، نمونه موفقی از به کارگیری سبک معماری بروتالیسم به شمار میرود
که ایده اصلی خود را از نظریه لوکوربوزیه مبنی بر انبوهسازی وامدار است.
واژه eclectic در لغت به معنای “عجیب
غریب” و در اصطلاح به معنای التقاطی است.
در سال ۱۸۴۶ مجادله ی بین دو سبک نئو
کلاسیسیسم و نئو گوتیک به اوج شدت خود رسیده بود. از آن زمان به بعد اکثر
معماران نه تنها از سبک کلاسیک و گوتیک استفاده کردند بلکه سبکهای رمانتیک،
بیزانس، مصری، عربی و رنسانس را هم بکار گرفتند. از این طریق بود که مکتبی که با
نام اکلکتیزم بوجود آمد. مکتبی که هسته ی آن در مکتبهای نئوکلاسیک ورمانتیک نهفتهاست.
هگل مکتب “اکلکتیزم” را نتیجه
برخورد چندین سبک می داند.
در مقابل این مکتب مکتبی به نام
“رسیونالیست”
شکل گرفت که شامل کسانی بود که از تناقضات موجود در اکلکتیزم ناراحت بودند. آنها
بر این عقیده بودند که باید عمق مطلب را در ورای ظواهر فرمال جستجو کرد و انتخاب
روش باید مستدل به حقایق خارجی بود، ضمن اینکه از طریق عینی قابل لمس باشد.
این سبک متاثر از
شخصیت هر فرد، خروجی متفاوتی دارد، قراردادها را زیرپا گذاشته و مرز میان سبک های
مختلف را از بین می برد. در ادامه درخواهید یافت که چگونه در این سبک تخصص پیدا
کنید. این سبک قواعد همیشگی را برهم زده و نو
و کهنه، شرق و غرب، لوکس و مندرس، پر زرق و برق و رنگ و رو رفته را با هم ترکیب و
تلفیق می کند. این سبک شما را دعوت می کند که فضا را با اشیایی پرکنید که دوست
دارید و منحصرا آنها را خودتان جمع آوری کرده اید
.
این به این معنا نیست که
هر کاری که دوست دارید انجام دهید. اگر کمی از این و کمی از آن بردارید و مقداری
از اشیا دیگر نیز به صورت تصادفی به فضای خود اضافه کنید، قطعا در نهایت یک فضای
درهم و وحشتناک خواهید داشت. آزادی که در سبک التقاطی وجود داشته و آن را جذاب
کرده است، نیاز به مهارت نیز دارد. باید آگاه باشید که مرز بین کنتراست و تضاد با
در هم ریختگی و هرج و مرج بسیار باریک است.
.
سبک اکلکتیک زمانی
عملی است که ارکان طراحی آگاهی داشته و از ادغام آنها برای ایجاد طرحی واحد
استفاده کنید.این ۵ رکن عبارتند از:خط – رنگ – بافت – حجم و فرم.
راهنمای خرید سیستم نیمه حرفه ای و حرفه ای تخصصی معماری تیر ٩٧
با
شروع تابستان به مهم ترین فصل خرید قطعات کامپیوتر می رسیم. وضعیت بازار
قطعات کامپیوتر در مقایسه با آخرین راهنمای خرید سیستم نیمه حرفه ای و حرفه
ای تخصصی معماری در دی ماه سال پیش که در اینجا می توانید مشاهده کنید تغییر چندانی نکرده است. کاهش قیمت ارز های دیجیتال
از وضعیت جهانی آشفته قطعاتی چون کارت گرافیک و پاور کاسته است. با این
حال عدم تخصیص ارز ۴۲۰۰ تومانی به فعالان این حیطه و برخی ابهامات در حقوق
گمرکی باعث شده قطعات کامپیوتر کاهش قیمت چندانی را در مقایسه با دی ماه
گذشته نداشته باشد. با این حال خرید سیستمنیمه حرفه ای و حرفه ایتخصصی
معماری دغدغه ایست که در هر شرایطی باید به آن پاسخگو بود. در مقایسه با
دی ماه گذشته برخی قطعات نظیر رم و سی پی یو افزایش قیمت حدود ۳۰-۴۰ درصدی
را تجربه می کنند. قیمت کارت گرافیک در برخی مدل ها و با جایگزینی TI
۱۰۷۰ یا نسخه اولیه ۱۰۷۰ در خط تولید انویدیا کاهش اندکی داشته است که
امیدوار کننده است. همچنان علی رغم افزایش قیمت، سی پی یو های سری رایزن AMD
در مالتی تسکینگ، تولید محتوا و پردازش های سنگین عملکرد بهتری در مقایسه
با سی پی یو های اینتل دارند و هر دو سیستم پیشنهادی ما مبتنی بر پردازنده
های این شرکت است.
سیستم پیشنهادی برای کاربری متوسط و حرفه ای اتوکد و اسکچاپ و رندر نیمه حرفه ای با VRAY و کورانا و کاربری مقدماتی با موتورهای بازی سازی نظیر UE
AMD Ryzen ۵ ۱۶۰۰X AM۴ Processor ۹۲۰/۰۰۰ CPU:
ASUS PRIME X۳۷۰-PRO AM۴ X۳۷۰ Mainboard ۹۰۰/۰۰۰ Motherboard:
تصمیم گیری چندمعیاره در طراحی ساختمان های هوشمند؛ با رویکرد بهینه سازی انرژی در راستای دستیابی به توسعه پایدار
پژوهشی از الناز اسدیان، کتایون تقی زاده، علی وکیلی اردبیلی
مقدمه
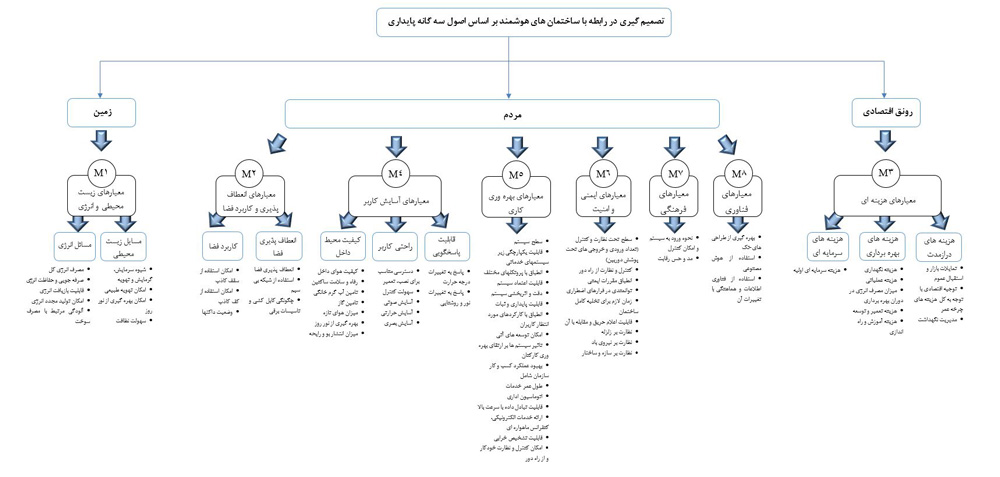
درمیان انبوه چالش هایی که نسل امروز با آن روبروست، وضعیت و نگرانی های زیست محیطی جایگاه ویژه ای را به خود اختصاص داده اند. رشد سریع مصرف انرژی در سطح جهان، نگرانی هایی را پیرامون دشواری تامین انرژی، اتمام منابع آن و اثرات زیست محیطی بهمراه داشته است. در این میان، ساختمان ها از بزرگترین مصرف کنندگان انرژی در کشور بوده به قسمی که میزان مصرف انرژی تنها در بخش ساختمانهای خانگی، تجاری و عمومی ۳۶% از کل انرژی مصرفی کشور می باشد. با توجه به این سهم بالا، بکار بردن راهکارهایی در راستای مصرف بهینه انرژی از جانب شمار زیادی از کشورهای جهان و شکل گیری مفاهیمی همچون “معماری سبز” و ” معماری پایدار” امری بدیهی می نماید. حال اگر این پایداری در رابطه با فعالیت های ساختمانی و محیط مصنوع صورت گیرد، تحت عنوان ساختمان پایدار یا ساخت و ساز پایدار شناخته می شود. با پیدایش مفهوم “ساختمان هوشمند”، ساختمان ها دیگر نه تنها به عنوان مصرف کننده انرژی شناخته نمی شوند بلکه به عنوان تولید کننده انرژی و قادر به بازیافت آن مطرح می گردند. هدف اصلی بکارگیری این ساختمان ها کاهش مصرف انرژی در کنار افزایش آسایش و سطح رفاه ساکنین میباشد. دامنه وسیع عوامل درگیر در طراحی این ساختمان ها دشواری تصمیم گیری طراحان را در فاز مفهومی به همراه داشته که این امر رویکردی چندمعیاره در ارزیابی فاکتورها را طلب می کند. در این مقاله ضمن بررسی تمامی عوامل تاثیرگذار بر این تصمیم گیری, ۶۹ معیار در قالب ۸ گروه مسائل زیست محیطی و انرژی، انعطاف پذیری و کاربرد فضا، مسائل هزینه ای، آسایش کاربر، بهره وری کاری، ایمنی و امنیت، فرهنگ و فناوری دسته بندی گردیده است. یافته های این پژوهش با ارائه بینشی تفصیلی از معیارهای تصمیم گیری، به درک دیدگاه ذینفعان کلیدی کمک کرده و مقدمه ای برای ارزش گذاری معیارها از دیدگاه آنان میباشد.
معماری پایدار
خاستگاه معماری پایدار در توسعه پایدار و باشگاه رم است. باشگاه رم یک سازمان غیر دولتی است که در سال ۱۹۶۸ در شهر رم تاسیس شد و در مورد مشکلات کلان جهانی تحقیق می کند. این باشگاه از تعدادی از پژوهشگران موسسه فناوری ماساچوست (MIT) در آمریکا درخواست کرد که در مورد محدوده توسعه اقتصادی و رشد جمعیت تحقیقاتی انجام دهد. در گزارشی که در سال ۱۹۷۲ منتشر گردید برای نخستین بار پیش بینی شد که به لحاظ محدود بودن منابع طبیعی و خصوصا نفت، رشد اقتصادی به صورت نامحدود ادامه نخواهد داشت. در سال ۱۹۷۴ گزارش دیگری توسط این باشگاه به نام “نقطه عطف برای بشریت” به چاپ رسید که بسیاری از فجایع زیست محیطی و اقتصادی پیش رو را توسط جامعه جهانی قابل کنترل دانست (۳). در ادامه و در سال ۱۹۸۷ کمیسیون جهانی محیط زیست و توسعه تعریف زیر را در مورد توسعه پایدار به سازمان ملل گزارش کرد:
“توسعه پایدار نیازهای امروز را بدون به مخاطره انداختن توانایی های نسلهای آینده برای تامین نیازهایشان برآورده می کند.”
همان طور که در شکل ۱ قابل مشاهده است این کمیسیون با بیان نگرانی درباره تخریب شتابزده منابع محیطی توجه به عوامل زیست محیطی و اقتصادی را در کنار توسعه اجتماعی برای دستیابی به توسعه پایدار اعلام می کند.
کاربرد مفاهیم پایداری در جهت کاهش اتلاف انرژی و آلودگی محیط زیست در معماری رویکردی است که تاکید بر مکان ساختمان در رابطه با اکوسیستم محلی و محیط جهانی دارد. بالا بردن بازده انرژی کل دوران استفاده ساختمان مهمترین هدف معماری پایدار است و مبنای آن بر اتخاذ تصمیماتی استوار است که هر گونه تاثیر منفی ساختمان بر محیط و انسانها را کاهش می دهد. از جمله اصول معماری پایدار می توان به کاهش مصرف منابع طبیعی و انرژی، طراحی بنا در هماهنگی با اقلیم، استفاده از عوامل طبیعی برای ایجاد آسایش و آرامش و استفاده از منابع انرژی تجدیدپذیر در بنا، طراحی در هماهنگی با سایت و توجه به ایجاد کمترین تغییرات در زمین و استفاده از مصالح قابل بازیافت، حفاظت از طبیعت و کاهش تولید سموم در آن اشاره کرد.
همانطور که از تعاریف ارانه شده قابل استدلال است بخش انرژی و بهره وری ساختمان از منظر مصرف انرژی از جمله نکات مهم در ساختمان های پایدار و سبز می باشد.
مصرف انرژی در ایران
رشد سریع مصرف انرژی در جهان، تاکنون نگرانی هایی را پیرامون دشواری تامین انرژی، اتمام منابع آن و اثرات زیست محیطی سنگینی همچون تخریب لایه اوزون، گرم شدن جهانی کره زمین و تغییرات اقلیمی به همراه داشته است و پیش بینی ها در باره آینده نشان از افزایش این رشد دارد.
کشور ما نیز از این قاعده مستثنی نبوده به قسمی که امروزه افزایش مصرف انرژی در کشور به مسئله ای جدی تبدیل گشته که توجه های بسیاری را به خود معطوف داشته است. تدوین سیاست ها و مقررات اجباری و یا تشویقی دولت در این راستا مبین این مطلب می باشد. از جمله این اقدامات می توان به اجباری نمودن مبحث ۱۹ مقررات ملی ساختمان در کشور طی برنامه ای پنج ساله و تلاش در راستای جایگزینی سایر حامل های انرژی به جای سوخت های فسیلی که توسط سازمان بهینه سازی مصرف سوخت صورت گرفته است اشاره کرد. با وجود تمامی این فعالیتها طبق آمار آژانس بین المللی انرژی میزان تولید انرژی در کشورمان در سال ۲۰۱۳ جوابگوی مصرف آن نمی باشد.
ترازنامه انرژی کشور که بر اساس استانداردها و مفاهیم بین المللی مورد توافق سه ارگان بین المللی شامل آژانس بین المللی انرژی، سازمان همکاری و توسعه اقتصادی و اداره آمار جوامع اروپایی تهیه می گردد افزایش چشمگیر در مصرف نهایی انرژی را نشان می دهد. مصرف سرانه انرژی در ایران بیش از ۵ برابر کشورهایی از قبیل هند و پاکستان و کمی کمتر از ۲ برابر چین است. همچنین کشورهایی همچون کره و ژاپن که تولید ناخالص داخلی آنها چندین برابر ایران می باشد مصرف سرانه ای تنها بین ۱۶ تا ۲۶ درصد بیشتر از ایران دارند. به طور کلی هر فرد در ایران ۶۸ درصد بیش از متوسط جهان انرژی مصرف می کند. این امر بهینه سازی مصرف انرژی را بیش از پیش ضروری می سازد. این در حالیست که در اواخر سال ۱۳۸۹ با اجرای طرح هدفمند سازی یارانه ها ، قیمت حامل¬های انرژی افزایش چشمگیری یافت. به طوریکه قیمت برق ۲۶.۵ درصد، گاز مایع ۱.۳ – ۵.۳ برابر و نفت گاز بین ۹.۱ – ۲۱.۲ برابر افزایش یافت.
افزایش قیمت انرژی می تواند زمینه ساز کاهش مصرف آن گردد ولی توجه به این نکته نیز ضروری است که این امر پیامدهایی از جمله کاهش سطح آسایش مصرف کننده را به همراه خواهد داشت. از سویی دیگر، کشورهایی که دارای سطح بالاتری از استاندارد زندگی هستند مصرف بیشتری داشته و در نتیجه این امر بر شدت انرژی آنها تاثیر می گذارد. حال سوالی که در اینجا مطرح می شود چگونگی بهینه سازی مصرف انرژی در کنار حفظ استانداردهای بالای زندگی و بعضا ارتقای رضایتمندی کاربران می باشد.
مصرف انرژی در بخش ساختمان
بخش ساختمان بزرگترین مصرف کننده انرژی در کشور می باشد. در ایران عمدتا از برق و انرژی های فسیلی در ساختمان ها استفاده می شود. از انواع انرژی فسیلی برای پخت و پز، گرمایش محیط و گرم کردن آب مصرفی و از برق برای روشنایی، گرمایش و سرمایش محیط و وسایل برقی خانگی استفاده می شود. همانطور که در شکل ۵ مشخص است میزان مصرف انرژی تنها در بخش ساختمان های خانگی، تجاری و عمومی ۳۶% از کل انرژی مصرفی کشور می باشد. با توجه به سهم بالای این میزان مصرف، بکار بردن راهکارهایی در راستای مصرف بهینه انرژی تاثیر قابل توجهی بر نگرانی های کمبود انرژی کشور دارد.
البته باید خاطر نشان کرد که این میزان مصرف فقط مختص ایران نبوده و تحقیقات به عمل آمده نشان دهنده مصرف ۴۰ درصدی انرژی در صنعت ساخت و ساز می باشد. آژانس بین المللی انرژی نیز عنوان می کند که حدود ۳۲ تا ۴۰ % کل مصرف انرژی متعلق به بخش ساختمان می باشد
علاوه بر مصرف بالای انرژی در این بخش به دلیل طراحی و ساخت نامناسب مصالح و تجهیزات غیر استاندارد و مواد بکار رفته در ساختمان ها ، عدم بهره وری و راندمان بالا ، انتخاب نامناسب پوشش ساختمان ها اعم از درب و پنجره ها و سیستم عایقکاری ، موجب اتلاف مقدار زیادی انرژی می شود. لذا برای آنکه کارایی انرژی مصرفی یک ساختمان بهبود یابد نخست باید مشخص شود که آن ساختمان در چه وضعیتی از لحاظ مصرف و اتلاف انرژی قرار دارد. در این راستا در سال ۱۳۹۰ وزارتین نیرو و نفت اقدامات متعددی از جمله انجام ممیزی انرژی، تدوین استانداردهای مربوط به بخش ساختمان و تجهیزات انرژی بر ساختمان و برگزاری دوره های آموزشی را در برنامه های خود داشته اند.
از این رو با توجه به میزان بالای مصرف انرژی در این بخش و عطف به لزوم صرفه جویی در منابع انرژی موجود ، تدوین راهکارهایی به منظور مدیریت بهینه مصرف انرژی از اهمیت بسیاری برخوردار است. ظهور فناوری های نوین می تواند زمینه ساز تحولاتی در این خصوص گردد. در راستای مدیریت بهینه انرژی و کنترل فرآیند مصرف آن “ساختمان های هوشمند” افق های جدیدی را پیش روی مهندسان قرار می دهد که در ادامه به آن پرداخته خواهد شد. در نتیجه بکار گیری این فناوری ها ساختمان ها نه تنها به عنوان مصرف کننده انرژی شناخته نمی شوند بلکه به عنوان تولید کننده انرژی و قادر به بازیافت آن مطرح می شوند. هدف اصلی بکارگیری سیستم های کنترل ساختمان کاهش مصرف انرژی در کنار افزایش آسایش و سطح رفاه ساکنین می باشد.
ساختمان های هوشمند
تاریخچه
در پی بحران انرژی که در سال ۱۹۷۳ اتفاق افتاد قیمت نفت و متعاقب آن قیمت سایر حامل های انرژی افزایش چشمگیری یافت. ادامه این روند تا سال ۱۹۸۰ که کامپیوترهای شخصی پا به عرصه وجود گذاشتند، سبب تغییر نگرش نسبت به فناوری به عنوان ابزاری جهت کنترل گردید. این امر سبب انقلابی در صنایع مختلف از جمله علوم مهندسی، علوم پزشکی و … گردید. دنیای امروز نیز از این قاعده مستثنی نبوده و شاهد پیشرفتهای سریع تکنولوژیکی به ویژه در حوزه هایی همچون علوم کامپیوتر و فناوری اطلاعات می باشیم. بخش ساخت و ساز و ساختمان نیز از جمله حوزه هایی است که تحت تاثیر این پیشرفت های تکنولوژیکی واقع گردیده است.
مفهوم “ساختمان هوشمند” که همراه با توسعه فناوری اطلاعات شکل گرفت، همزمان با افزایش تقاضا برای داشتن “محیط زندگی راحت تر” و تمایل کاربر برای “افزایش کنترل محیط خود” پیچیده تر گردید .
بحث “ساختمان هوشمند” اولین بار در سال ۱۹۸۱ توسط شرکت فناوری سیستم های ساختمان ایالات متحده مطرح گردید و در جولای سال ۱۹۸۳ با افتتاح ساختمان “City Place” در هارتفورد کنتیکت به یک واقعیت تبدیل گشت. در این پروژه شرکت UTBS مسئول کنترل و راه اندازی تجهیزات مشترکی همچون تهویه مطبوع، آسانسورها و دستگاه های پیشگیری از فاجعه بود. این شرکت همچنین خدمات ارتباطی همچون اتوماسیون اداری، شبکه محلی (LANs) و … نیز به کاربران ارائه می داد. ساختمان هارتفورد به عنوان نخستین ساختمان هوشمند جهان شناخته می شود.
تعریف ساختمان هوشمند
تا کنون تعاریف علمی، تکنیکی و فنی بی شماری از ساختمان هوشمند ارائه شده است. بر طبق پژوهش صورت گرفته توسط ویگینتن و هریس (Wiggin ton & Harris) بیش از ۳۰ تعریف جداگانه از “هوشمندی” در رابطه با ساختمان وجود دارد (۱۳). تعاریف اولیه تنها بر روی جنبه های تکنولوژیکی متمرکز بوده و به مسایل مهمی همچون تعامل کاربر نمی پرداختند. نخستین بار کاردین در سال ۱۹۸۳ ساختمان هوشمند را به عنوان “ساختمانی که سیستم های کنترل خدمات آن به طور کامل اتوماتیک گشته است” تعریف نمود.
موسسه ساختمان هوشمند واشنگتن در سال ۱۹۸۸ تعریف زیر را برای ساختمان هوشمند ارائه داد:
“ساختمانی که سیستم های متنوع را به منظور مدیریت موثر منابع به شکلی هماهنگ یکپارچه می¬نماید. هدف این امر بیشینه کردن عملکرد فنی، صرفه اقتصادی سرمایه گذاری و هزینه های اجرایی و انعطاف پذیری می باشد.”. تعاریف تکنولوژیکی صرف توسط بسیاری از پژوهشگران مورد انتقاد قرار گرفته است. به عنوان مثال DEGW در اواسط دهه ۱۹۸۰ اذعان داشت که ساختمانی که قادر به انطباق با تغییرات صورت پذیرفته در سازمان شامل خود نباشد قبل از موعد مقرر منسوخ گشته و نیاز به بازسازی و اصلاح قابل توجهی خواهد داشت. محققین دیگری نیز بر این ویژگی ساختمان هوشمند تاکید داشته و بیان می کنند که ساختمان هوشمند باید قادر به پاسخگویی به احتیاجات کاربر باشد.
برخی پژوهشگران بر این باورند که ساختمان هوشمند با تاکید بر تلاش های چند رشته ای، ۴ عامل سازه، سیستم ها، خدمات و مدیریت را در راستای ایجاد محیطی بهره ور، با صرفه اقتصادی و مطلوب زیست محیطی برای ساکنین یکپارچه و بهینه می نماید.
نکته قابل تاملی که از این تعاریف قابل نتیجه گیری می باشد این است که بهینه سازی عملکرد فنی و برخورد صرفا تکنولوژیکی با این قبیل ساختمان ها هدف نبوده و مواردی همچون توجه به احتیاجات کاربر و تلاش در راستای پاسخگویی به آنها نیز باید مدنظر قرار گیرد. به عنوان مثال بر طبق یافته های کلمنتس و کروم (Clements-Chrome)، سیستم های خدماتی و مدیریت روند کار یک ساختمان ارتباط نزدیکی با رفاه و سلامت انسان ها دارد. محیط ساختمان بر رفاه و آسایش انسان ها در محیط کار تاثیر می گذارد و این امر به نوبه خود بر بهره وری انسان ها، روحیه و رضایت آنان اثرگذار است.
تعاریف اخیر ساختمان هوشمند، مفاهیم “توانایی یادگیری” و “اصلاح عملکرد متناسب با نیازهای کاربر و محیط” را نیز در بر می گیرد. به عبارتی دیگر یک ساختمان هوشمند ساختمانی نیست که تنها قادر به واکنش و تغییر بر اساس نیازها و احتیاجات فردی ، سازمانی و محیطی باشد بلکه باید قادر به یادگیری و انطباق عملکرد خود بر اساس ملزومات کاربران یا محیط خود باشد.
تمامی این مطالب گواه این حقیقت اند که متخصصان مختلف در حیطه ساختمان هوشمند درک و تعاریف مختلفی برای این مفهوم ارائه می دهند. به عنوان مثال موسسه ساختمان هوشمند ایالات متحده آمریکا و گروه ساختمان های هوشمند بریتانیا به عنوان دو قطب مطرح در این زمینه تعاریف متناقضی از هوشمند سازی ارایه داده اند؛ موسسه ساختمان هوشمند ایالات متحده آمریکا یک ساختمان هوشمند را بدین شکل تعریف می نماید:
“ساختمانی که از طریق بهینه سازی ۴ عنصر اصلی سازه، سیستم ها، خدمات و مدیریت و نیز روابط متقابل میان آنها محیطی بهره ور و با صرفه اقتصادی ایجاد می کند.” (۱۳). ساختمان های هوشمند به مالکین، مدیران پروژه و ساکنین خود کمک می کند تا اهداف هزینه ای، راحتی، ایمنی، انعطاف پذیری طولانی مدت و پذیرش بازار خود را محقق سازند. همچنین این موسسه عنوان می کند که یک سری مشخصات و ویژگی های ثابت برای تعریف هوشمندی وجود ندارد؛ در واقع تنها ویژگی مشترک در تمامی ساختمان های هوشمند طراحی یک ساختار برای انطباق با تغییرات به شیوه ای راحت و با صرفه اقتصادی (مالی) می باشد.
این در حالیست که گروه اروپایی ساختمان هوشمند بریتانیا ساختمان هوشمند را به عنوان “ساختمانی که با ایجاد محیطی مطلوب، اثربخشی ساکنین خود را بیشینه نموده درحالی که همزمان قادر است با مدیریت موثر منابع ، هزینه های چرخه عمر تسهیلات و سخت افزارها را کمینه نماید” تعریف می کند.
از مقایسه این دو تعریف چنین برداشت می شود که تعریف اروپایی بیشتر بر احتیاجات کاربر تمرکز دارد درحالیکه در تعریف آمریکایی تکیه بر خود تکنولوژی شاخص تر می باشد (۱۹). سو و همکاران طی پژوهشی که در سال ۲۰۰۱ انجام دادند اذعان می دارند که ساختمان هوشمند به خودی خود هوشمند نبوده بلکه آنها قادرند با بهره گیری از تجهیزات هوشمند ساکنان خود را در راستای کار موثرتر یاری نمایند.
در ادامه به بررسی تعاریف ساختمان هوشمند در کشورهای مختلف پرداخته می شود:
تعریف هوشمند سازی در آسیا
وزارت کار سنگاپور بیان می کند که ساختمانی هوشمند است که ۳ شرط زیر را تحقق بخشد:
۱- ساختمان بایستی با بهره گیری از سیستم های کنترل اتوماتیک، تجهیزات و تسهیلات متفاوتی همچون سیستم تهویه مطبوع، دما، روشنایی، ایمنی، اطفای حریق و … را پایش کرده و محیطی راحت برای ساکنین فراهم کند.
۲- ساختمان بایستی زیر ساخت شبکه ای خوبی داشته تا تبادل و جریان اطلاعات میان طبقات را امکانپذیر سازد.
۳- ساختمان باید تسهیلات ارتباط از راه دور کافی را مهیا کند.
تعریف ساختمان هوشمند در چین
در چین ساختمان های هوشمند در دو گروه “۳A” یا “۵A” تقسیم بندی می شوند. “۳A” بدین مفهوم است که ساختمان ۳ کارکرد اتوماتیک اتوماسیون ارتباطات (CA)، اتوماسیون اداری (OA) و اتوماسیون مدیریت ساختمان (BA) را در بر می گیرد. چنانچه ساختمان هوشمند سیستم اتوماسیون حریق (FA) و سیستم اتوماسیون نگاهداشت (MA) را نیز در کنار موارد قبل یکپارچه نماید تحت عنوان “۵A” شناخته می شود.
تعریف ساختمان هوشمند در ژاپن
با توجه به توسعه اتوماسیون اداری و افزایش قیمت زمین در ژاپن، کانون ساختمان های هوشمند در این کشور بر ۴ جنبه زیر تکیه دارد:
۱- ارائه خدمات به عنوان یک منبع دریافت و انتقال اطلاعات و حمایت از مدیریت بهره برداری
۲- تضمین رضایت و راحتی برای افرادی که در آن محیط مشغول به کار هستند.
۳- ارائه خدمات بیشتر با هزینه کمتر منطق بکار رفته در این قبیل ساختمان ها می باشد.
۴- توانایی پاسخگویی سریع، انعطاف پذیر و اقتصادی به تغییرات محیط، تنوع و پیچیدگی در محیط کار و استراتژی های کسب و کار فعال.
از تعاریف بالا چنین استنباط می شود که در تعریف ژاپنی، تاکید بیشتر بر خود ساکنین بوده و آنها در اولویت اول قرار دارند. در پایان باید ذکر شود که بیشتر تعاریف موجود در این حوزه یا به قدری مبهم هستند که نمی توانند راهنمایی مفید برای طراحی جزئیات باشند و یا با تمرکز نامتعادل و تکیه بیش از حد بر فناوری، متناسب با فرهنگ آسیایی نمی باشند؛ از آنجایی که بدون داشتن یک تعریف صحیح ساختمان های نسل آینده به شکلی بهینه طراحی نخواهند شد، نیاز به تعریف دقیق ساختمان هوشمند ضروری می نماید.
در این راستا سو و همکارانش یک استراتژی دو سطحی برای تدوین و فرموله کردن تعریفی مناسب از ساختمان هوشمند ارائه داده اند. سطح اول شامل ۹ ماژول ” کیفیت محیط زیست ” (M۱-M۹) و سطح دوم شامل ۳ حوزه از عناصر کلیدی نیازهای عملکردی، فضاهای کارکردی و فناوری ها می باشد.
چو پیشنهاد گنجاندن ماژول اضافی M۱۰ به عنوان مکمل به منظور در نظر گرفتن مسائل بهداشت و سلامت برای ساختمان ها ارائه داده است. لذاQEM تجدید نظر شده (M۱ – M۱۰) شامل موارد زیر می باشد:
-دوستدار محیط زیست، سلامت و حفاظت انرژی
-کاربرد فضا و انعطاف پذیری
-اثربخشی هزینهای، عملکرد و نگهداشت با تاکید بر اثربخشی
-راحتی و آسایش انسان
-بهره وری کاری
-معیارهای ایمنی و امنیت – آتش سوزی، زمین لرزه، بلایای طبیعی و آسیب های ساختاری
-فرهنگ
-تصویری از فناوری بالا
-فرآیند ساخت و ساز
-سلامت و بهداشت
به هر یک از ۱۰ ماژول اصلی ذکر شده در بالا تعدادی از عناصر کلیدی اولویت بندی شده اختصاص داده می شود.
در ادامه سو و همکارانش تعریف ساختمان هوشمند را به شکل زیر اصلاح می کنند:
“ساختمانی که بر اساس انتخاب مناسب ماژول کیفیت محیط زیست و به کمک بهره گیری از امکانات مناسب پاسخگوی نیازهای کاربر بوده و ارزش های بلند مدت را برای ساختمان به همراه دارد”.
این تعریف جدید دو بعد نیازهای ساکنین/ مالکان ( به طور کلی اقلام تحویل دادنی ) و فناوری ( سیستم ها و خدمات )را در بر می گیرد. یکپارچه سازی و ادغام این دو بعد ارزش افزوده ای همچون بهره وری، افزایش بازار، حفاظت انرژی و … را برای ساختمان به دنبال دارد. بدین ترتیب هر نوع ساختمان کم و بیش مجموعه ای از معیارهای طراحی را به منظور تبدیل شدن به یک ساختمان هوشمند دارا می باشد.
تصمیم گیری در رابطه با بکارگیری فناوری های هوشمند
حال که مزایای بهره گیری از این سیستم های هوشمند به شکلی مختصر عنوان گردید چالشی که پیش روی تیم طراحی قرار می گیرد مساله انتخاب از میان انواع راهکارها و سیستم های موجود بر اساس نیازهای کارفرما می باشد. در این راستا، تیم طراحی باید با انتخاب بهینه و ادغام فناوری های موجود پیکر بندی مطلوب را که انتظارات توسعه دهندگان را برآورده ساخته و نیازمندی های خاص کاربران نهایی را ارضاء می کنند توسعه دهند.
پیچیدگی تصمیم گیری و انتخاب توسط خواسته های عملکردی چند معیاره و چند بعدی کارفرما تشدید می شود. از جمله این موارد می توان به نمونه های زیر اشاره نمود:
– کاربر دوستی- پروتکل های بین المللی استاندارد – نیازهای تجاری و کسب و کار کاربر
– توانایی یکپارچه سازی سیستم های مختلف – قابلیت های صرفه جویی انرژی
در نتیجه تیم های طراحی باید میان این ملاحظات و اهداف و انتظارات کارفرما تعادلی پویا ایجاد نمایند. با وجود چنین پیچیدگی هایی در ارزیابی و انتخاب سیستم های کنترل ساختمان های هوشمند، نیاز به ابزاری برای تصمیم گیری به شدت احساس می شود.
مدل های ارائه شده تا کنون بیشتر بر عملکرد هزینه ای ( شامل هزینه های اولیه، عملیاتی و نگهداری) که به راحتی قابل کمی شدن می باشند متمرکز بوده و توجه کمی به حوزه هایی همچون آسایش کاربر، پایداری زیست محیطی و انعطاف پذیری ساختمان داشته اند. در نتیجه سیستم های پیشرفته که بالاترین اولویت را در صرفه جویی هزینه ای دارند انتخاب می¬شوند که ممکن است به انتخابی جهت دار منجر گردد.
توجه به این نکته مهم است که مسائل هزینه ای و مالی تنها یکی از عوامل موثر بر تصمیم گیری پیرامون بکارگیری سیستم های مدیریت و کنترل هوشمند ساختمان می باشد؛ لذا لزوم شناسایی عوامل و پیشرانه های دیگر نیز برای تصمیم گیری در این زمینه امری بدیهی می نماید. این در حالیست که مطالعات کمتری به درک و شناخت عوامل و معیارهای انتخاب سیستم کنترل ساختمان در رابطه با توسعه یک مدل ارزیابی پرداخته اند.
چارچوبی پیشنهادی این مقاله با بهره گیری از استراتژی دو سطحی ارائه شده توسط سو که پیش از این عنوان گردید، معیارهای اصلی انتخاب را در قالب ۸ گروه (در بر گیرنده ماژول های M۱ تا M۸ از ماژول های کیفیت محیط زیست) تقسیم بندی می کند. در سطحی پایین تر هر کدام از این معیارهای اصلی به معیارهای فرعی تقسیم شده و در ادامه در سطح سوم ریزمعیارهای تصمیم جای می گیرند.
نتیجه گیری
به علت عدم وجود یک لیست جامع از معیارهای ارزیابی، یک رویکرد منطقی و سیستماتیک برای تسهیل انتخاب وجود ندارد. در نتیجه این امر کارفرما و تیم طراحی مجبور می شوند که بر تجربیات گذشته خود تکیه کرده و با قضاوت های سطحی در رابطه با توجیه این سیستم ها تصمیم گیری نمایند. این امر به نوبه خود می تواند به عدم انتخاب راه حل بهینه و مناسب منجر گشته که در نتیجه پروژه قادر به رسیدن به سطح رضایتمندی کارفرما نخواهد بود. از این رو هدف این مقاله یافتن معیارها و عوامل موثر بر تصمیم گیری انتخاب این سیستم ها با در نظر گرفتن شاخص های موجود در کشور و ارانه چارچوبی نظام مند برای تصمیم گیری می باشد.
با توجه به ماهیت چندمعیاره بودن تصمیم گیری پیرامون بکارگیری فناوری های هوشمند ساختمان در راستای دستیابی به توسعه پایدار، بهترین مدل پیشنهادی شکستن مسئله تصمیم در قالب سطوح پایین تر می باشد که امکان بررسی تمامی ریز معیارها را فراهم می کند.
راهنمای خرید سیستم نیمه حرفه ای و حرفه ای تخصصی معماری، دی ٩٦
در شروع فصل پاییز در این مقاله به راهنمایی در مورد خرید سیستم نیمه حرفه ای و حرفه ای تخصصی
معماری پرداختیم. حال با شروع زمستان و با توجه به وضعیت بسیار پیچیده و تاسف بار
بازار سخت افزار، ضرورت این راهنمایی بیش از پیش شده است.
این روزها بازار سخت افزار در وضعیتی اسفناک به سر می برد، قیمت ها سر به فلک
کشیده اند، محصولات متعددی دیگر یافت نمی شوند، مراکز خرید هم که از جنب و جوش
افتاده اند. در وضعیت حاکم همه به دنبال یافتن مقصر هستند. شاید بهای دلار متهم
اصلی باشد اما هنگامی که با شرکت های سخت افزاری و وارد کنندگان صحبت می کنید، آن
ها از بهای دلار تنها به عنوان یکی از عوامل شکل گیری وضعیت حاکم یاد می کنند. حال
این وضعیت به هر دلیلی باشد با افزایش قیمت بین ۳۰ تا ۴۰۰% توان خرید بسیاری از
دانشجویان، فعالان و متخصصان معماری نیز مانند دیگر گروه ها به شدت کاهش یافته
است. خرید سیستم های تخصصی در این شرایط به طور تقریبی و در مقایسه با مهر امسال
حدود ۷۰% گران تر تمام خواهد شد. ولی خرید یک سیستم
برای کار با نرم افزارهای معماری مانند اتوکد و اسکچاپ و همین طور توانمند در
ارائه خروجی سریع و با کیفیت با ۳D
Max و موتورهای رندر مانند Vray،Unreal Engine،Cry Engine، Maxwell، Cinema ۴D و سایر آنها دغدغه ایست که در هر شرایطی
باید پاسخگوی آن بود.
این بار با توجه به بازخوردها و درخواست هایی که شما داشتیم در ۲ گروه متوسط
و حرفه ای به معرفی سیستم
های تخصصی معماری خواهیم پرداخت. در مورد پاور در شرایط فعلی گزینه های زیادی
موجود نیست. Cooler master،corsair و بسیاری از برندهای مطرح در
شرایط فعلی تقریبا هیچ محصول خوبی در بازار ندارند. در صورت موجودی هم قیمت بسیار
بالا شمارا از خرید منصرف خواهد کرد. با این حال بهترین گزینه ممکن در شرایط فعلی
با توجه به تناسب قیمت و کیفیت و همخوانی با سیستم پیشنهادی معرفی شده است.
عملکرد سی پی یو های سری رایزن AMD
در مالتی تسکینگ، تولید محتوا و پردازش های
سنگین به شدت جالب توجه است و در مقایسه با همتایان خود از اینتل در یک رنج
قیمت عملکرد بهتری دارند. عملکرد سی پی یو های اینتل در بحث گیمینگ به جهت
فرکانس بالاتر بهتر است که خب در این مورد کاربردی برای ما نخواهد داشت.
سیستم پیشنهادی برای کاربری متوسط و حرفه ای اتوکد و اسکچاپ و رندر مقدماتی با
VRAY و کورانا و موتورهای بازی سازی
CPU: AMD Ryzen ۵ ۱۶۰۰X ۹۵۰/۰۰۰
Motherboard: ASUS PRIME X۳۷۰-PRO ۷۵۰/۰۰۰
Graphic Card: Inno۳d GTX ۱۰۵۰ Twin X۲ ۶۵۰/۰۰۰
Ram: Gskill Trident Z ۱۶GB ۸GBx۲ ۳۰۰۰Mhz CL۱۵ ۷۶۰/۰۰۰
HDD: WD Blue ۱TB ۷۲۰۰Rpm ۲۰۰/۰۰۰
SSD: Samsung ۸۵۰ PRO ۱۲۸GB ۳۰۰/۰۰۰
Power: Green GP۶۰۰B-HP+ Gold ۳۷۰/۰۰۰
Monitor: LG ۲۴MP۶۸VQ ۸۷۰/۰۰۰
سیستم پیشنهادی برای کاربری حرفه ای اتوکد و اسکچاپ و رندر حرفه ای با Vray، و رندرنیمه
حرفه ای با Unreal Engine،Cry Engine، Maxwell،Cinema ۴D
CPU: AMD Ryzen Threadripper ۱۹۲۰X ۳.۱۰۰.۰۰۰
Motherboard: MSI X۳۹۹ Gaming Pro Carbon AC ۱/۸۰۰/۰۰۰
١٠ دفترکار که حسی شبیه به خانه را در آن تجربه خواهید کرد
در این مقاله مروری خواهیم داشت بر ۱۰ دفتر کاری که تلاش داشته اند حسی شبیه
به خانه را برای کارمندان خود به وجود آورند. اکثر آنها نه دفاتر بزرگ بلکه فضاهای
کوچک صمیمی هستند که اندکی خلاقیت و هنر آنها را با محیط جذابی تبدیل کرده است.
Objective Subject office, USA, by GRT Architects
یک اتاق خواب تاریک را می توان در این واحد ساختمان بازسازی شده قرن نوزدهمی
مشاهده کرد. هدف تیم طراح در این پروژه برآورده کردن خواسته کارفرما که آژانس
خدمات دیجیتالی هستند بوده است. فضای کار صمیمی که کاملا شبیه خانه باشد.
Airbnb San Francisco headquarters, USA, by Airbnb
هشت آپارتمان در این پروژه تبدیل به فضایی یکپارچه برای دفتر مرکزی شرکتی در
سانفرانسیسکو شده است.
Kinfolk offices, Denmark, by Norm Architects
به منظور ایجاد فضای کاری صمیمانه که در آن ایده ها بتوانند به راحتی بین
کارکنان به اشتراک گذاشته شود.
IKEA creative hub, Sweden, by Nanna Lagerman
این بانک سابق توسط طراح سوئدی مشهور نانا لاگرمن به مرکز خلاقیت بنیاد IKEA تبدیل شده
است.لاگرمن ۱۵ فضای با سبک های متمایز را زیر یک سقف گردهم آورده است.
Eventbrite offices, US, by Rapt Studio
دفتر موسسه ایونبرایت کارمندانش را تشویق می کند برای استراحت و تمرکز در این
فضای زین مانند حضور یابند.
Muxin office, China, by Muxin
تلاشی برای کاهش تاثیرات سرعت زندگی مدرن توسط تیم طراح در این پروژه صورت
گرفته است.مبل، میز قهوه و میز بار همراه یا گرمای مطبوع شومینه باعث شده است تا
مهمانان احساس حضور در خانه را داشته باشند.
Masquespacio studio, Spain, by Masquespacio
اجتناب از کلیشه های رایج طراحی داخلی دفاتر تجاری باعث شده است در این پروژه
رنگ های روشن و متضاد که به زیبایی سبک ممفیس را بازتاب می دهند در ترکیب با
گیاهان ، مبل ها و میزهای پذیرایی احساس حضور در خانه ای شاد را یادآور می شود.
Memocorp office, Australia, by The Stella Collective
حضور در بالاترین طبقه برج تجاری در منطقه مالی سیدنی باعث شده است که این
شرکت سرمایه گذاری بیش از هرچیز شبیه به یک پنت هاوس لوکس باشد. زبان بصری طراحی
داخلی آن خطوط بیضوی، استفاده از چوب ماهور و بلوط و مبلمان راحت است.
Fjord office, Finland, by Joanna Laajisto
مبلمان راحت و پرده های کتان طبیعی با هم ترکیب شده اند تا حس و حال این دفتر
شبیه به خانه باشد. کارفرما خواسته بود که کارمندانش در دفتر جدید بیش از هر چیز احساسی
شبیه به راحتی در خانه خود داشته باشند.
Ansarada office, USA, by Those Architects
مجموعه
ای از کوسن های کف به همراه قفسه کاملی از گیاهان و درخچه های تزئینی همراه با
مبلمان غیر رسمی در بازسازی این کارخانه در استرالیا به کار رفته اند.
زلزله یکی از مخرب ترین نیروهای مخرب طبیعی است. تقریبا پیش بینی ناپذیر و به
شدت قدرتمند که می تواند هر سازه ای را در کمتر از ۱ دقیقه تخریب کند. با این حال
پیشرفت مهندسی سازه و معماری در قرن ۲۱ سبب شده است که سازه های غول آسایی در نقاط
زلزله خیر جهان ساخته شود. بر مهندس معمار و سازه شناخت زلزله، انواع حرکت صفحات
تکتونیک و چگونه رخ داد آن واجب است. ایران جز کشورهایی است که
متراکم ترین شهرهای آن بر روی گسل های فعال و خطرناکی ساخته شده اند. تهران با
احاطه شدن توسط ۲۵۰ گسل شناخته شده و دوره چرخش ۲۰۰ ساله زلزله بالای ۷ ریشتر بیش
از هر چیز نیازمند توجه اصولی به مقاوم سازی و مهندسی زلزله در بلندمرتبه سازی است.
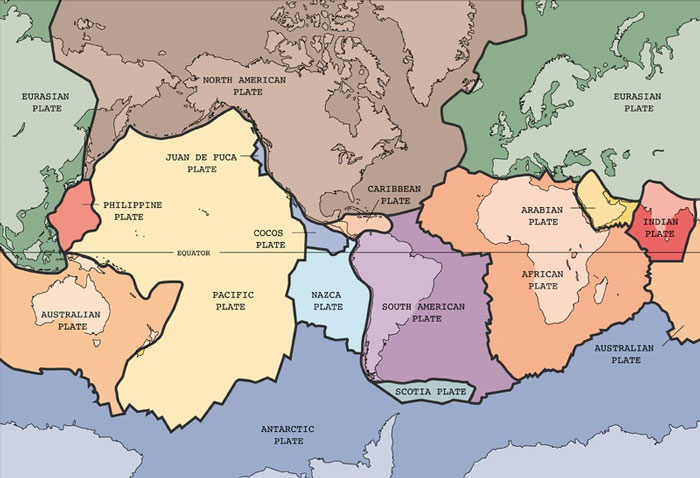
تقریبا همه در مورد حرکت صفحات تکنوتیک و نحوه تاثیر آنها بر هم اطلاع دارند.
زمین لرزه ها زمانی اتفاق می افتد که این صفحات تکنوتیکی با یکدیگر برخورد می کند
و در محل برخورد انرژی های مهیبی آزاد می شود. دانستن اینکه امواج زلزله به شکل
ترکیبی از تکانه های خطی، موجی، ضربه ای و کششی از پی به بدنه ساختمان وارد میشود
و شروع به برآیند سازنده می کند مهم ترین اصل در طراحی ساختمان های مقاوم در برابر
زلزله در نقاط با پتانسیل وقوع زلزله های شدید است.
در این مقاله نگاهی خواهیم داشت بر ۵
ساختمانی که به دلیل طراحی اعجاب انگیز و مهندسی ساخت حیرت انگیز توانایی مقابله
با شدیدترین زلزله ها را دارا هستند.
۵. Sabiha Gökçen International Airport
Sabiha Gökçen یکی از دو فرودگاه بین المللی استانبول، شهر
توریستی محبوب ترکیه است. این فرودگاه و به طور کلی این شهر در نزدیکی گسل آناتولی
شمالی قرار دارد که توانایی تولید زلزله های ویرانگری را دارد. تیم Ove Arup در طراحی این
فرودگاه بیش از ۳۰۰ سیستم جداکننده پایه را به کار برده اند که این سازه بتواند تا
۸ ریشتر زلزله را تحمل کند. جداکننده های پایه می توانند شدت لرزه های وارده به پی
و طبقات را تا ۸۰% کاهش دهند. این فرودگاه بزرگترین سازه با جداکننده در جهان است.
۴. Transamerica Pyramid
ساختمانی متعلق به دهه ۷۰ امریکا که در کالیفرنیا و در نزدیکی گسل های سن آندریاس و های وارد قرار دارد. در سال
۸۹ و در طی زلزله ۶.۹ ریشتری کالیفرنیا در آن سال ساختمان بیش از ۱ دقیقه در
حال لرزیدن بود. با این حال بدون هیچ صدمه ای توانست این زلزله به شدت طولانی را تحمل
کند. راز این مقاومت را می توان در پی ریزی و بنیان فولادی و بتنی این ساختمان دانست.
پی این ساختمان به گونه ای طراحی شده است که بارهای لرزه ای را به جای انتشار به
بالا در سطح گسترش دهد. بارهای عمودی و افقی توسط یک سیستم تراس منحصر به فرد که
تا طبقه ۴۵ گسترش یافته است کنترل می شود. ترکیبی پیچیده از فرآیند انتقال تکانه
های لرزشی از پی به سطح و جذب تکانه های ضربه ای توسط پی، این ساختمان ۵۰ ساله را
همچنان جز ابر سازه های مقاوم در برابر زلزله قرار داده است.
۳. Burj Khalifa
برج خلیفه قطعا نیازی به معرفی ندارد. یکی از مشهورترین و برجسته ترین برج های
جهان که در عین حال یکی از مقاوم ترین سازه های جهان در برابر زلزله نیز است.
کل
برج از طبقات مکانیکی تشکیل شده است که در آن دیوارهای بیرونی، ستون های
حامل بار را به دیوارهای داخلی متصل می کند. ستون های حامل بار مقاومت
جانبی
ساختار اصلی ساختمان را افزایش می دهند و از برآیند مثبت تنش های لرزه ای
جلوگیری
می کنند. ساختاری پیچیده یا مهندسی نامتقارن که بخشی از محاسبات آن نیز
توسط
ابرکامپیوترهای دانشگاه کلتک انجام شده است. برج خلیفه به دلیل همین ساختار
چه در
برابر لرزش های عرضی و چه ضربه های پیچشی به شدت مقاوم است. مطالعات
ژئوتکنیکی و
لرزه نگاری پیش از ساخت این برج امروزه الگویی مترقی برای هر شرکتی است که
برنامه
ساخت آسمان خراش در نقاط با پتانسیل رخداد زلزله های ویرانگر را دارد.
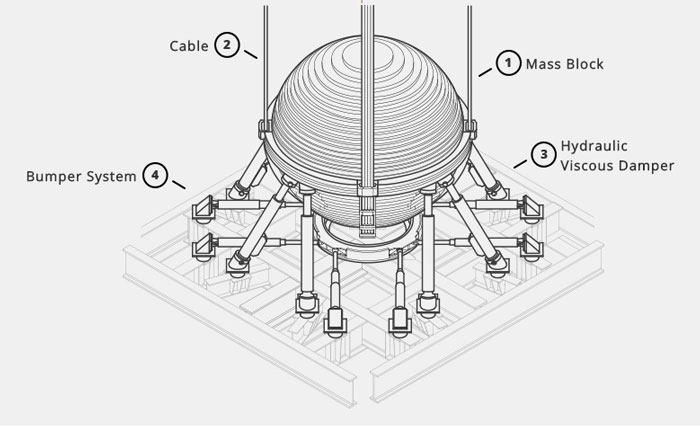
۲. Taipei ۱۰۱
تایپه صدویک درکنار زیبایی فریبنده خود بدون شک یکی از بی نظیرترین و منحصر به
فردترین آسمانخراش های دنیا در زمینه مقاومت در برابر زلزله و بادهای شدید است. جدا
از معماری سحرآمیز تایپه صد و یک مجهز به بزرگترین دامپر تنظیم کننده حرکت (TMD) در جهان است.
توپ فلزی غول آسایی که در مرکز برج قرار دارد و با سیستمی مشابه پاندول با حرکت در
خلاف جهت، تکانه وارده ناشی از باد و زلزله را به شدت کاهش می دهد.
تی ام
دی این برج توسط بازوهای هیدرولیک و سیستم های بامپر مشابه چیزی که در کمک فنر ماشین
های پیشرفته است پشتیبانی می شود. هنگامی که نیروی بزرگی به سازه وارد و آن را به
سمتی سوق می دهد تی ام دی در جهت مخالف حرکت می کند و تعادل را به ساختمان
بازمی گرداند. تایپه ۱۰۱ بی شک یکی از مهم ترین دستاوردهای مهندسی سازه و دانش
مکانیک در تاریخ صنعت ساختمان سازی است. تی ام دی در حد فاصل طبقات ۸۷ تا
۹۲ این ساختمان قرار گرفته است.
۱. Philippine Arena
فیلیپین آرنا بزرگترین محوطه سرپوشیده یکپارچه جهان و شگفت انگیز ترین سازه
مقاوم در برابر زلزله جهان است. این مجموعه متعلق به گروه مذهبی INC است که آن را
برای گردهمایی ۱۰۰ هزارنفری خود به مناسبت ۱۰۰امین سالگرد تاسیس خود در ۲۷ جولای ۲۰۱۴
افتتاح کرده اند. امروزه این مرکز یکی از مهم ترین جاذبه های توریستی بالاکان
فیلیپین است.
این مجموعه توسط شرکت معماری استرالیایی Populous و شرکت مهندسی
پیشرفته Buro Happold ساخته شده است. صفحه زمین شناختی کشور فیلیپین در امتداد حلقه آتش
اقیانوس آرام، خطرناکترین و فعال ترین زنجیره گسل های روی کره زمین قرار دارد.
زمین لرزه های این کشور به اعداد بسیار ترسناکی در حدود ۸.۲ ریشتر رسیده اند و در
کنار آن ساکنین این کشور به دلیل همین زنجیره گسل های فعال، در معرض خطرهای دیگر
طبیعی نظیر آتش فشان، سونامی و رانش زمین نیز قرار دارند.
سقف استادیوم این مجموعه در کوتاه ترین مسیر در ارتفاع ۱۶۵ متری قرار گرفته
است و طراحی شیب دار آن به گونه ای است که در مقابل شدیدترین زلزله ها، باد و توفان
مقاوم است. ثابت شده است که در طول زلزله بارهای جانبی که در طول ساختار اصلی
ساختمان ایجاد می شوند می تواند تا ۴۰% جرم کلا ساختمان باشند.
عددی که در
صورت عدم مدیریت مناسب می تواند هر سازه را در خود خرد کند. شرکت بورو برای
حل این
مسئله به شکل هوشمندانه ای تمام سازه اصلی را به شکل ایزوله ساخته است. به
طوری که
تمام پایه ها هنگام رخدادی مانند زلزله به شکل مستقل
عمل می کنند و مانع انتقال تکانه به قسمت های دیگر می شوند. گپ بین سازه
اصلی و پی
توسط بلبرینگ های سربی پر شده است که مقاومت بسیار زیادی در برابر تخریب
دارند. این
سیستم اجازه می دهد در هنگام وقوع زلزله پی و زیرساخت بتواند به طور هماهنگ
با زلزله حرکت کند در حالی که سازه اصلی کاملا ثابت بماند. شاهکاری که
بدون شک مهم ترین دستاورد علمی
مهندسی زلزله در ساختمان سازی در تمام تاریخ است. این سازه با مقاومت حدود
۸.۵ ریشتر، مستحکم ترین سازه ساخت بشر در برابر زلزله است.
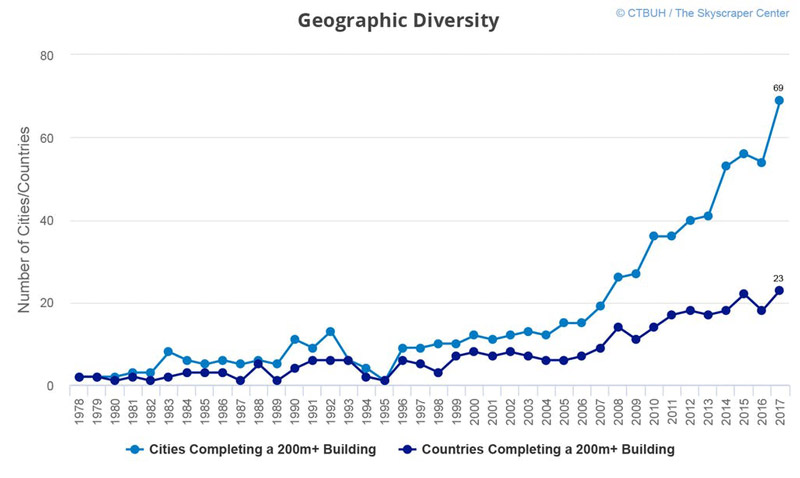
گزارش تحلیلی وضعیت بازار بلندمرتبه سازی در سال ٢٠١٧
با نزدیک شدن به پایان سال سازمان های تحلیل گر در سرتاسر جهان گزارش های
آماری،تحلیلی خود را از عملکرد حوزه های کاری خود در سال گذشته منتشر می کنند.
شورای ساختمان های بلند و سکونت گاه های شهری هم در آخرین گزارش خود وضعیت
بلندمرتبه سازی در سال ۲۰۱۷ را مورد بررسی قرار داده است. بلندمرتبه سازی تابعی از
رشد اقتصادی، فعالیت اقتصادی و امید به رشد سرمایه گذاری است و با وضعیت جهانی پول
و ریسک سرمایه گذاری ارتباط مستقیم دارد.
در میان بلندترین ساختمان هایی که در سال گذشته در جهان تکمیل شده اند ۵ برج
در چین قرار دارد. ۳ برج در دبی و دو مورد دیگر در کره جنوبی و لس آنجلس واقع شده
است. نکته جالب وجود تنها یک ساختمان از ایالت متحده در لیست ۵۰ ساختمان بلند
تکمیل شده امسال است. کشوری که خود سرآغاز دانش بلندمرتبه سازی است و نخستین برج
های جهان در این کشور ساخته شده اند.
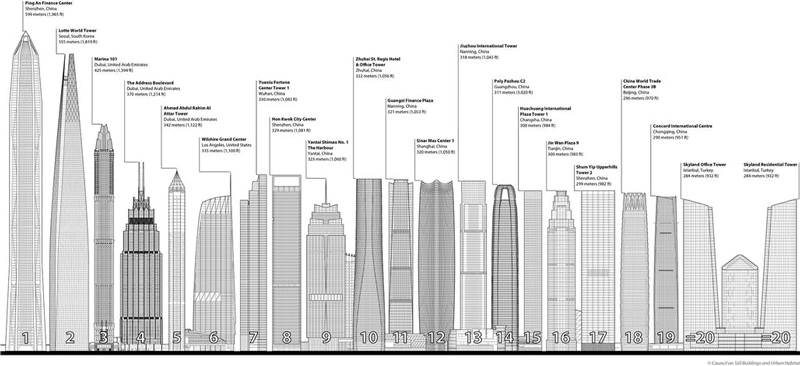
لیست ۱۰ برج که امسال تکمیل شده اند را در زیر مشاهده می کنید. ترتیب لیست
طبیعتا بر اساس ارتفاع آنها از زیاد به کم مرتب شده است.
۱- Ping an Finance
Center, Shenzhen, China,
۱۱۵
stories, ۵۹۹ m / ۱۹۶۵ Ft.,
Design Architect: Kohn Pedersen
Fox Associates
–
۲- Lotte World Tower, Seoul,
South Korea,
۱۲۳
stories, ۵۵۵ m / ۱۸۱۹ Ft.,
Design Architect: Kohn Pedersen
Fox Associates
–
۳- Marina ۱۰۱,
Dubai, United Arab Emirates,
۱۰۱
stories, ۴۲۵ m / ۱۳۹۴ Ft.,
Design Architect: National
Engineering Bureau
–
۴- The Address Boulevard, Dubai,
United Arab Emirates,
۷۳
stories, ۳۷۰ m / ۱۲۱۴ Ft.,
Design Architect: Atkins
–
۵- Ahmed Abdul Rahim Al Attar
Tower, Dubai, United Arab Emirates,
۷۶
stories, ۳۴۲ m / ۱۱۲۲ Ft
–
۶- Wilshire Grand Center, Los
Angeles, United States,
۶۲
stories, ۳۳۵ m / ۱۱۰۰ Ft.,
Design Architect: AC Martin
–
۷- Yuexiu Fortune Center Tower ۱, Wuhan, China,
۶۹
stories, ۳۳۰ m / ۱۰۸۳ Ft.,
Design Architect: WilkinsonEyre
–
۸- Hon Kwok City Center,
Shenzhen, China,
۸۰
stories, ۳۲۹ m / ۱۰۸۱ Ft.
–
۹- Yantai Shimao No. ۱ The Harbour, Yantai, China,
۵۹
stories, ۳۲۳ m / ۱۰۶۰
ft,
Design Architect: Wong Tung &
Partners
–
۱۰- Zhuhai St. Regis Hotel &
Office Tower, Zhuhai, China
۶۱
stories, ۳۲۳ m / ۱۰۵۹
ft,
Design Architect:
Coscia Moos Architecture; RMJM
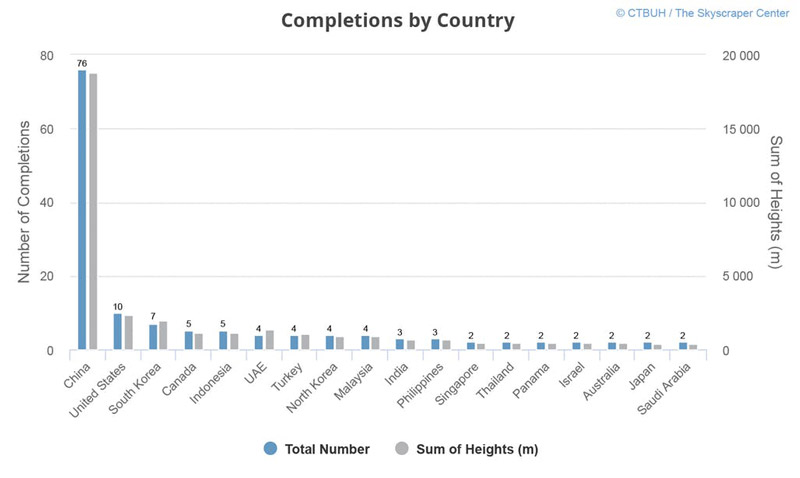
چین امسال بازار بلندمرتبه سازی را رهبری کرده است. آنها امسال ۷۶ ساختمان با
ارتفاع بیش از ۲۰۰ متر را با موفقیت تکمیل کرده اند. این عدد ۵۳% کل ساختمان بلند
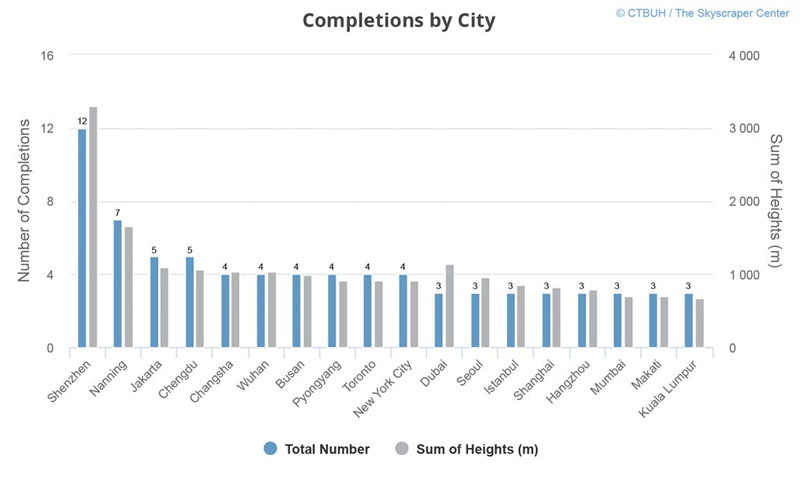
در سال ۲۰۱۷ است. شهر شنزن به تنهایی با ۱۲ پروژه رتبه ۱ جهان را به خود اختصاص
داده است.
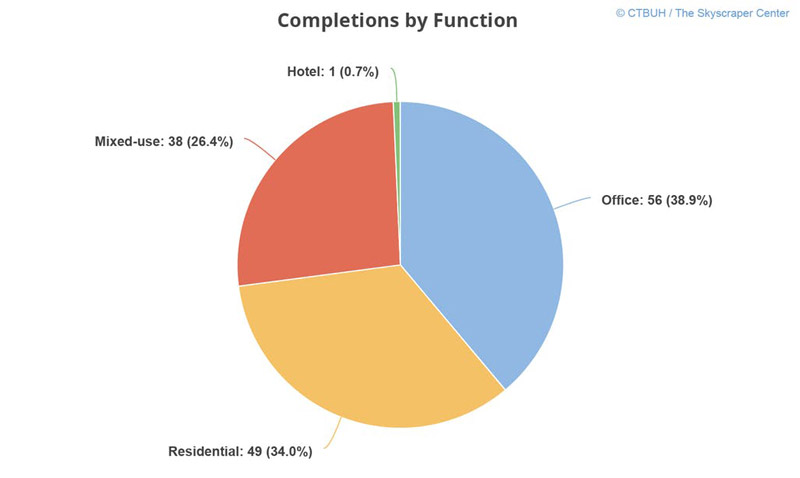
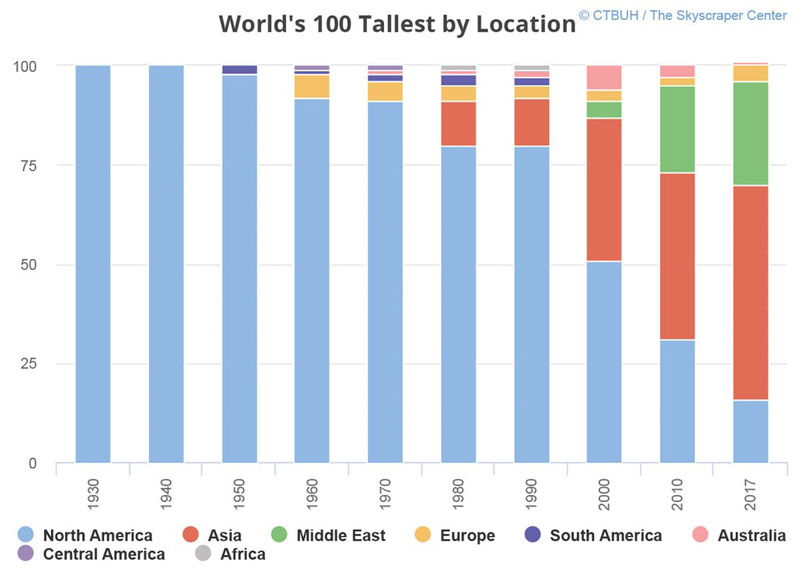
در ادامه و به کمک نمودار نگاهی تحلیلی بر شاخص های اصلی بررسی انجام شده در سال ۲۰۱۷ می اندازیم.